TECHNOLOGY
DSO'S ROBOT "DOGS" LEAD THE WAY
05 Jul 2022
Meet the engineers who lead the teams behind the Foxhound and Harrier unmanned vehicles, in the first of our "DSO 50 Tech" series. This series dives into some of the cutting-edge technology that DSO provides the SAF, and marks DSO's 50th anniversary this year.

Navigating through tough terrain without prior maps or GPS (Global Positioning System), and without putting your soldiers at risk – this is something the team at DSO National Laboratories (DSO) has been working on with the Singapore Armed Forces (SAF).
Previously, unmanned vehicles still required an operator stationed remotely in the vicinity to control them. But DSO has made the next leap into unmanned systems.
The Foxhound Unmanned Ground Vehicle (UGV), for example, is able to navigate autonomously, crossing complex terrain without operator control.
It can also do so without maps or the use of the GPS, which means that connectivity issues or outdated maps will not affect the green machine.

"Not only can it plan its own behaviour and execute them autonomously to perform missions, it can also navigate to avoid obstacles in challenging off-road terrain," explained Mr Edward Rankin, 40, Principal Robotics Autonomy Engineer.
His team achieved this through designing algorithms that utilise techniques like Real-Time Spatial Mapping. This is where the UGV uses the relative depth of objects around it to estimate distance, and then builds a map of its environment while localising itself within the map.
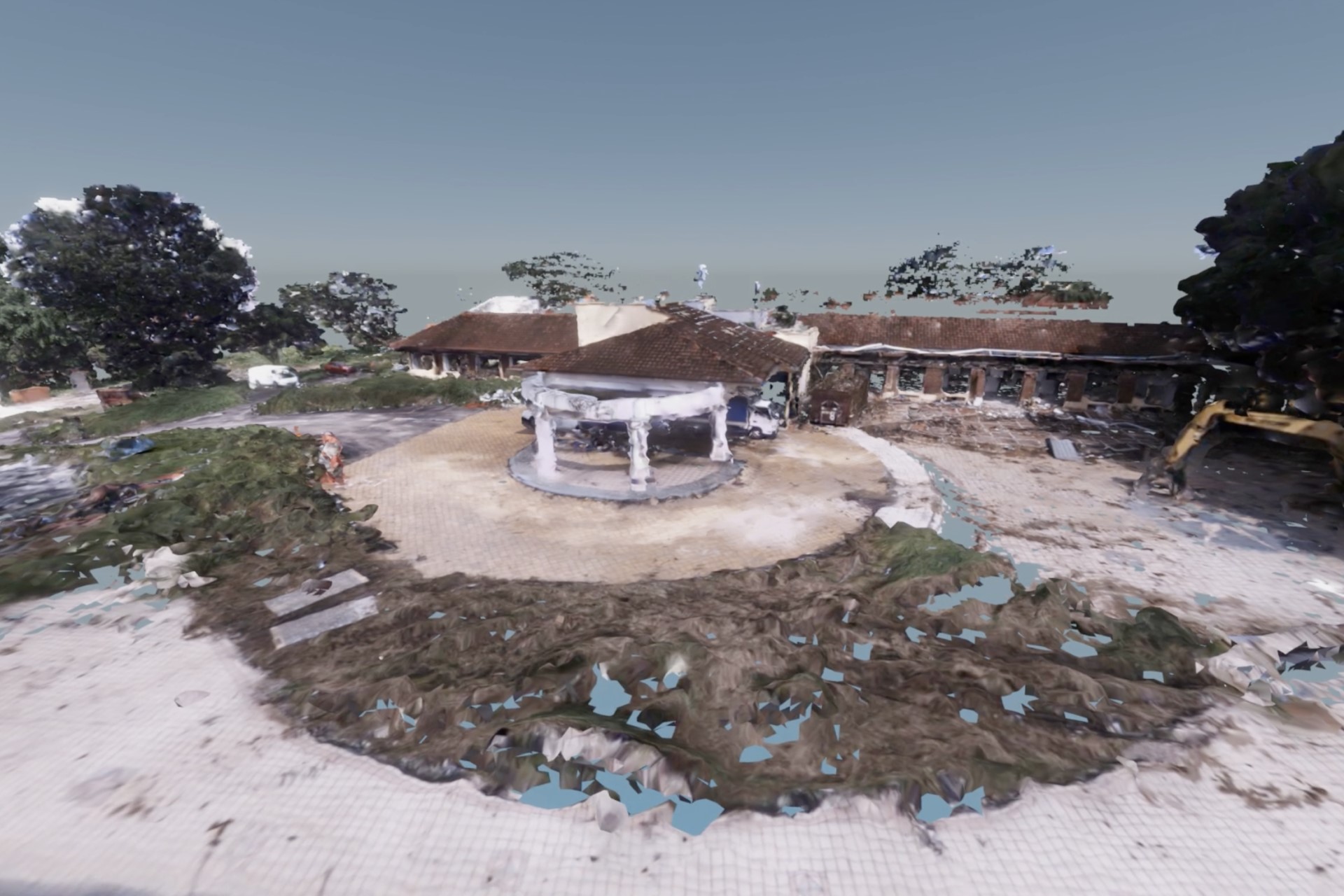
Recently, the team paired the Foxhound with an Unmanned Aerial Vehicle (UAV), with the goal of having them navigate an uncharted environment.
The result? A single, highly accurate visual 3D map of the area, built in real time.

Real-time mapping
Pairing two unmanned systems of different domains was no easy feat.
"The first challenge was the difference in perspectives between the UGV and UAV because of their difference in height (when operating).
"For them to effectively team together to form a single map, there has to be sufficient overlap in what each platform sees," explained Mr Rankin, who has worked on UGVs at DSO for over 16 years.
To overcome this, the team used Light Detection and Ranging (LiDAR) and camera sensors, then fused the data from both to generate textured 3D maps in near real-time.
The engineers also developed algorithms that employ artificial intelligence techniques so that the two platforms could identify overlapping features in their environment – in order to understand their positions relative to each other.
This also allowed the systems to better merge their data to create a useful 3D map.

Exploring indoors
DSO is not stopping there. Late last year, it added the Harrier Quadrupedal UGV into its fold, to push the limits of autonomy.
Aptly named, the Harrier resembles a dog walking with its front and hind legs, and is able to lie down and tilt its torso from side to side.
This mobility means that it is able to manoeuvre through tight spaces and narrow corridors. It can even climb up stairs – something the Foxhound cannot do.
Getting the Harrier to have the same kind of autonomy as the Foxhound, however, was "quite a mean feat", said Ms Elaina Koh, a Senior Robotics Autonomy Engineer.
"This is because the Harrier's movement with four legs, compared to Foxhound's wheels, vastly increases the complexity of the algorithms," explained the 37-year-old.
"There's also a stability difference because its main load is elevated on four legs. The way it rolls and pitches is different and this affects the mapping," she added.

The team persevered through many failed attempts before finally getting the Harrier to move with their autonomy algorithms.
They are now pairing the Harrier with the Foxhound, with the aim of teaming it with other unmanned systems.
Once mission-ready, the Harrier will offer new perspectives to operators during their missions, said Ms Koh.
"With the Harrier, we can now cover explorations of indoor areas. It lets the unmanned vehicles complement each other in giving the operator a more complete situation picture."
Watch how the Foxhound and Harrier work together to map out an area.

ALSO READ IN TECHNOLOGY


AI joins the fight in national cyber defence exercise
12 Nov 2025
AI and closer collaboration among agencies and industry are taking centre stage in this year’s Critical Infrastructure Defence Exercise (CIDeX).

They built this city
01 Oct 2025
Turning vision to reality: the team behind SAFTI City clinches the Defence Technology Prize 2025 Team (Engineering) Award!

Operating over skies & seas
22 Aug 2025
This gear is designed to help a Sensor Supervisor survive emergencies in the air and at sea.