TECHNOLOGY
引领潮流的DSO机器"狗"
05 Jul 2022
在这个"DSO 50技术"系列的第一篇文章里,我们将为您介绍"猎狐犬"(FOXHOUND) 和 "猎兔犬"(HARRIER) 无人驾驶车辆背后的工程师团队。本系列将深入探讨国防科技研究院 (DSO)为新加坡武装部队 (SAF) 提供的尖端技术,并致敬国防科技研究院 (DSO)成立50周年。


士兵在没有地图或GPS(全球定位系统)的情况下,可安全穿越崎岖复杂的地形—这是DSO国家实验室(DSO)团队与新加坡武装部队 (SAF) 合作研发的项目。
在此之前,无人驾驶车辆仍需要驻扎在附近的操作员进行远程控制。然而国防科技研究院 (DSO) 在无人驾驶系统方面取得了质的飞跃。
例如,猎狐犬无人驾驶地面车辆(UGV)能够自主导航,在无操作员控制的情况下穿越复杂地形。
猎狐犬UGV也可在没有地图或全球定位系统(GPS)的情况下自主行驶,这代表当没有网络连接或地图更新不及时都不会影响猎狐犬UGV工作。

今年40 岁的首席自主机器人工程师爱德华.岚金(Edward Rankin)先生说:"为了完成任务,猎狐犬UGV不仅可以自主规划行为,还可以自主导航以避开复杂地形中的障碍物。
岚金先生的团队利用实时空间映射等技术算法实现了这一目标。该设计原理是无人驾驶地面车辆(UGV)利用周围物体的相对深度来估计距离,构建环境地图,同时在地图内定位自己。
最近,该团队同时出动猎狐犬与无人驾驶飞行器(UAV)进行陆空协调配合,以实现在未知环境中导航的目标。
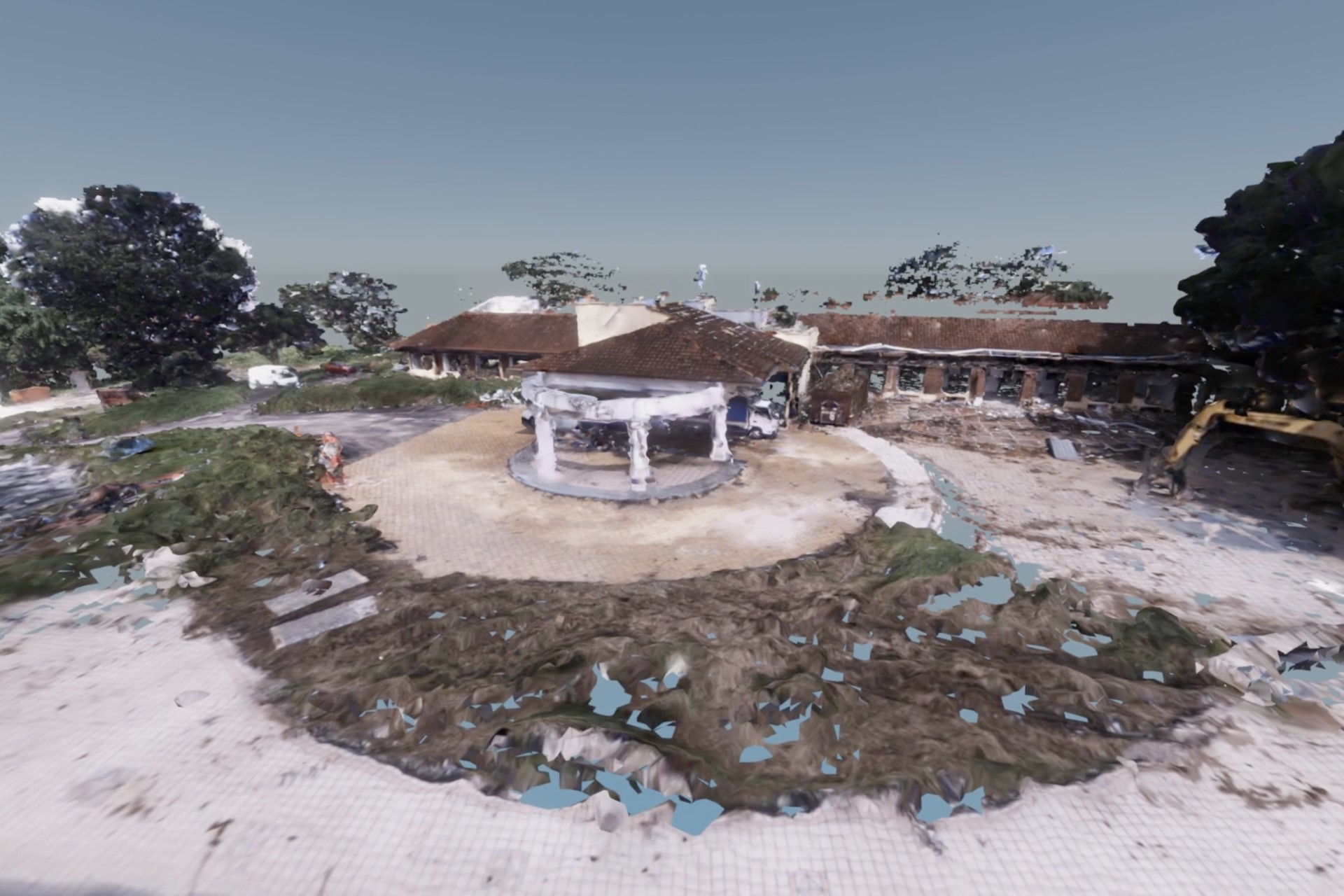
结果如何?实时构建了该区域的单一、高准确度的可视化3D地图。

该团队成功地将猎狐犬UGV 与UAV(无人机)配对(上图)。两个平台一起自主探索未知区域,构建实时3D地图(下图)。[照片由DSO提供]
实时测绘
将两个不同领域的无人系统配对并非易事。
"由于UGV和UAV运行高度不同,我们面临的第一个难题是UGV和UAV的视角差异。"
在国防科技研究院 (DSO) 负责无人驾驶地面车辆(UGV)工作已有16年之久的岚金先生说:"为了让UGV和UAV有效地配合共同绘制地图,两个平台看到的画面必须足够的重叠。"
为了解决这个问题,该团队使用激光雷达(LiDAR)和相机传感器,结合两者的数据,生成准实时的纹理3D地图。
工程师还开发了人工智能算法,用于两个平台识别它们所在环境的重叠特征, 以便使无人驾驶地面车辆(UGV)和无人驾驶飞行器(UAV) 定位彼此的位置,。
这也使得系统能够更好地合并数据,创建有效精准的3D地图。

探索室内
国防科技研究院 (DSO) 没有停止研发的脚步。去年年底,他们研发了"猎兔犬"这种 四足无人驾驶地面车辆,拓展了自主行驶的限度。
对猎兔犬起的名字恰如其分,它可以像狗一样用四肢行走,躺下,左右摇摆身体。
猎兔犬的这种灵活性有利于它在狭小的空间和狭窄的走廊上穿梭。它甚至可以爬楼梯—这是猎狐犬做不到的。
然而,高级自主机器人工程师伊琳娜.许(Elina Koh)女士表示,让猎兔犬与猎狐犬拥有相同的自主能力是"相当艰巨的任务"。
"这是因为与猎狐犬的轮子相比,猎兔犬的四足特点大大增加了算法的复杂性,"今年37岁的伊琳娜.许女士说。
伊琳娜.许女士还补充说,"两者相比稳定性也存在差异,猎兔犬主要用四足承载负载。它的走动方式不一样,而这会影响测绘。"

该团队坚持不懈,经过多次失败的尝试,最终成功利用他们开发的自主算法让猎兔犬行走起来。
他们现在正在将猎兔犬与猎狐犬配对,目的是与其它无人系统合作。
许女士说,一旦准备好执行任务,猎兔犬将在执行任务期间为操作员提供新的视角。
"有了猎兔犬,现在我们能够将探索区域覆盖到室内。它让无人驾驶车辆相互补充,为操作员提供更完整的周遭环境地形图。"
快来看看猎狐犬与猎兔犬是如何合作绘制区域地图的。




