TECHNOLOGY
"ANJING" ROBOT DSO MENGORAK LANGKAH
05 Jul 2022
TEMUI JURUTERA YANG MENGETUAI PASUKAN YANG BERTANGGUNGJAWAB TERHADAP KENDERAAN TANPA PEMANDU FOXHOUND DAN HARRIER, DALAM SIRI PERTAMA "DSO 50 TECH" KAMI. SIRI INI MEMANFAATKAN TEKNOLOGI CANGGIH YANG DISEDIAKAN OLEH DSO UNTUK SAF, DAN MENANDAKAN ULANG TAHUN DSO YANG KE-50 PADA TAHUN INI.


Mengharungi bentuk muka bumi yang sukar tanpa sebarang peta atau GPS (Sistem Kedudukan Sejagat) dan tanpa merisikokan anggota tentera anda – ini adalah sesuatu yang diusahakan oleh anggota pasukan di Makmal Kebangsaan DSO (DSO) dengan Angkatan Bersenjata Singapura (SAF).
Sebelum ini, kenderaan tanpa pemandu masih memerlukan pengendali terpencil di kawasan sekitar untuk mengawalnya. Tetapi DSO telah membuat lonjakan seterusnya ke dalam sistem tanpa pemandu.
Contohnya, Kenderaan Darat Tanpa Pemandu Foxhound (UGV), mampu mengemudi secara autonomi, merentasi bentuk muka bumi yang kompleks tanpa kawalan pengendali.
Ia juga boleh berbuat demikian tanpa mengguna peta atau GPS, yang bermaksud isu ketersambungan atau peta lapuk tidak akan menjejaskan mesin hijau tersebut.

"Bukan sahaja ia boleh merancang tingkah lakunya sendiri dan melaksanakannya secara autonomi untuk menjalankan misi, malahan ia juga boleh mengemudi untuk mengelakkan halangan muka bumi luar jalan yang mencabar," jelas Encik Edward Rankin, 40, Ketua Jurutera Autonomi Robotik.
Pasukannya telah mencapai kemajuan ini dengan mencipta algoritma yang mengguna teknik seperti Pemetaan Ruang Masa Nyata. Di sinilah UGV memanfaatkan kedalaman relatif objek di sekitarnya untuk menganggarkan jarak, dan kemudian membina peta persekitarannya sambil menempatkan dirinya di dalam peta.
Baru-baru ini, pasukan itu bergamnding bahu dengan Pesawat Tanpa Pemandu Foxhound (UAV), dengan tujuan untuk membolehkannya mengemudi kawasan sekitar yang tidak dicartakan.
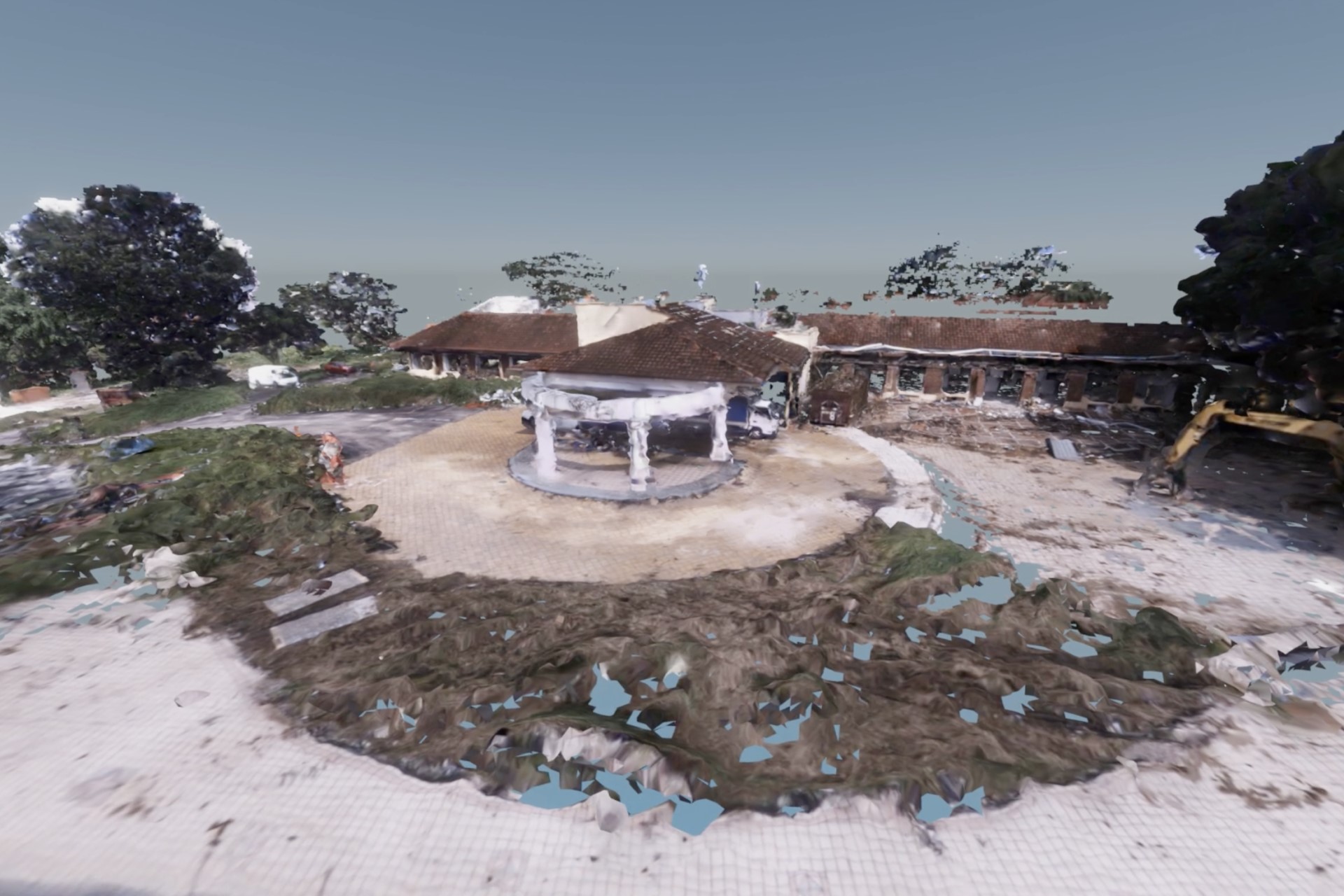
Hasilnya? Satu peta 3D visual yang sangat tepat bagi kawasan itu, dibina dalam masa nyata.

Pasukan itu berjaya memasangkan Kenderaan Foxhound UGV dengan Pesawat UAV (di atas). Kedua-dua platform secara autonomi menerokai kawasan yang tidak diketahui bersama-sama dan membina peta 3D dalam masa nyata (di bawah). [Foto: DSO]
Pemetaan masa nyata
Menggandingkan dua sistem tanpa pemandu daripada domain yang berbeza bukanlah sesuatu yang mudah.
"Cabaran pertama ialah perbezaan perspektif di antara UGV dan UAV memandangkan perbezaan ketinggiannya (semasa beroperasi).
"Bagi mereka untuk bekerjasama dengan berkesan dalam membentuk satu peta, perlu ada pertindihan yang mencukupi dalam apa yang dilihat oleh setiap platform," jelas Encik Rankin, yang bekerja di UGV di DSO selama lebih 16 tahun.
Untuk menangani kesulitan ini, pasukan ini mengguna Pengesanan Cahaya dan Tentu Jarak (LiDAR) dan penderia kamera, kemudian menggabungkan data daripada kedua-duanya untuk menjana peta 3D bertekstur dalam hampir masa nyata.
Para jurutera juga mencipta algoritma yang mengguna teknik kecerdasan buatan supaya kedua-dua platform dapat mengenal pasti ciri pertindihan dalam persekitaran mereka – untuk memahami kedudukan mereka secara relatif di antara satu sama lain.
Ini juga membolehkan sistem menggabungkan data mereka dengan lebih sempurna untuk mencipta peta 3D yang berguna.

Meneroka kawasan dalaman
DSO tidak berhenti di situ. Lewat tahun lepas, ia telah menambah Kenderaan Harrier Quadrupedal UGV ke armada kenderaannya, untuk melangkaui batasan autonomi.
Sesuai benar dengan namanya, kenderaan Harrier seumpama anjing berjalan dengan kaki depan dan belakangnya, serta boleh berbaring dan menggerakkan badannya dari sisi ke sisi.
Mobiliti ini bererti ia mampu bergerak melalui ruang ketat dan koridor sempit. Ia juga boleh menaiki tangga – sesuatu yang Foxhound tidak mampu melakukan.
Melengkapkan kenderaan Harrier dengan jenis autonomi yang sama seperti Foxhound, adalah "suatu pencapaian yang mengagumkan", kata Cik Elaina Koh, seorang Jurutera Autonomi Robotik Kanan.
"Ini adalah kerana pergerakan kenderaan Harrier yang berkaki empat, berbanding dengan roda kenderaan Foxhound, meningkatkan lagi kerumitan algoritma," jelas jurutera yang berusia 37 tahun itu.
"Terdapat juga perbezaan kestabilan kerana beban utamanya dinaikkan pada empat kaki. Cara ia bergerak dan melontar adalah berbeza dan ini memberi kesan kepada pemetaan," tambahnya.

Pasukan itu tekun mengharungi banyak percubaan yang gagal sehingga akhirnya berjaya menggerakkan Harrier dengan algoritma autonomi mereka.
Kenderaan Harrier kini sedang dipasangkan dengan Foxhound, dengan tujuan untuk menggabungkannya dengan sistem tanpa pemandu yang lain.
Sebaik sahaja ia bersedia untuk menjalankan misi, Harrier akan menawarkan perspektif baharu kepada pengendali semasa misi mereka, kata Cik Koh.
"Dengan adanya kenderaan Harrier, kami kini boleh menerokai kawasan dalaman dengan lebih meluas. Ia membolehkan kenderaan tanpa pemandu saling melengkapi dalam memberi pengendali gambaran situasi yang lebih lengkap."
Tontoni bagaimana pasangan kenderaan Foxhound dan Harrier bekerja bersama-sama untuk memetakan suatu kawasan.

ALSO READ IN TECHNOLOGY


AI sertai perjuangan dalam latihan pertahanan siber kebangsaan
12 Nov 2025
AI dan kerjasama erat antara agensi dan industri menjadi tumpuan utama dalam Latihan Pertahanan Infrastruktur Kritikal (CIDeX) tahun ini.

MEREKA MEMBINA BANDARAYA INI
01 Oct 2025

BEROPERASI DI LANGIT & LAUTAN
22 Aug 2025
Peralatan ini direka untuk membantu Penyelia Sensor bertahan dalam keadaan kecemasan di udara dan di laut.